
研究1:低重力惑星探査機ホッピングローバーの制御
太陽系に存在する数多の天体の地表に無人探査機(ロボット)を送り込んで土壌組成や地形の探査を行うことは,生命誕生を含む太陽系形成過程の解明や人の宇宙滞在時の資源確保といった大きな意義があります.特に,大多数を占める小惑星や惑星衛星などの低重力天体の地表を探査するためには,それに特化した探査機が必要です.実際,車のような車輪駆動型のロボットでは,①進行速度が遅くなるので非効率的,②一度スタック(転倒や車輪スリップなど)すると復帰が困難,といった理由で運用が難しくなります.

(Courtesy NASA/JPL-Caltech)
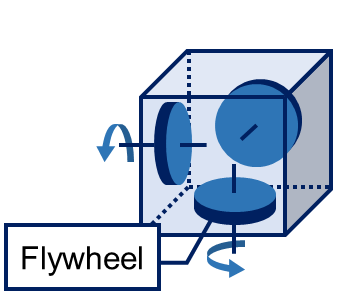
このような低重力天体を探査するため,ホッピングローバー(図1,通称Hedgehog)がNASAによって開発されています.一辺約30cmの立方体形状をしたこのロボットは,機体内部に搭載されたフライホール(図2)によってジャンプを繰り返しながら移動することができます.この移動方法(図3,ホッピング)によって,高速かつスタックなしに任意の目的地へ向かうことが可能になります.
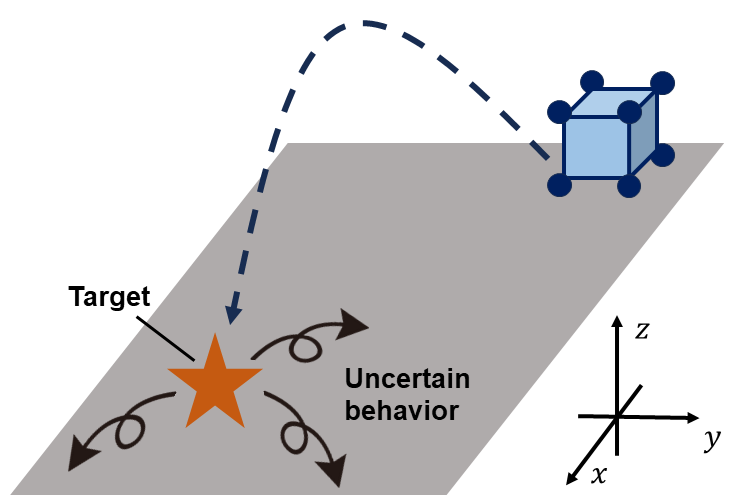
一方,図3のようにホッピングには着地時の不確実性が伴います.これが外乱となりロボットの位置決め制御に悪影響を及ぼします.さらに,不確実に転がるうちに観測雑音が膨れ上がり,センサデータが劣化します.移動中の地面との衝突による搭載機器の故障も考えられます.
本研究では,制御工学の観点からホッピングローバーで低重力惑星探査を行うシステムを構築するためのアイデアを検討します.主な問題は「ホッピングに起因するローバーの課題を解決し,精確にローバーを目的地へ移動させる」ことです.
テーマ1:マルチホッピングローバーシステムの合意制御
ホッピングローバーは小型であるため,一度のミッションで複数機を同時に運用することができます.特に,複数機が協調する探査システムであるマルチホッピングローバーシステムは,低重力天体探査の効率を大きく向上することが期待されます.
合意制御
本研究では,マルチエージェントシステムの代表的な制御である合意制御を達成することが目的です.これによって,でたらめに散らばったローバー群が相対的な情報を頼りにして集合したり,隊列を組んで走行することが可能になります.
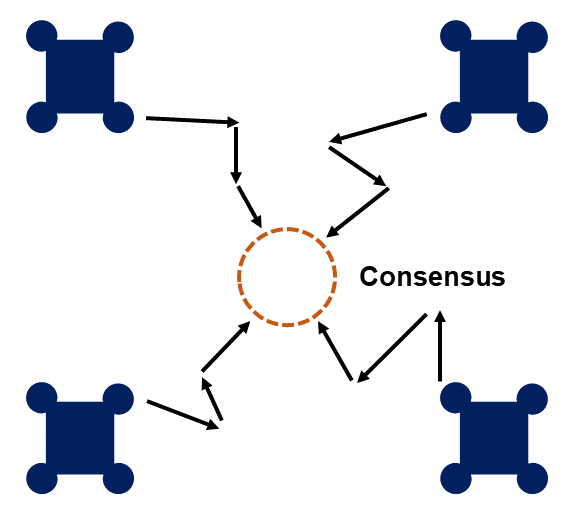
一方,不確実な挙動を示すローバー群を一か所に合意(図4)させることは簡単ではなく,これを実現することがシステムの信頼性にとって重要でした.そこで,本研究ではシステムの非合意要素が平均二乗安定となるような合意制御器のゲインを求めることで,システムの合意を達成しました.
テーマ2:ホッピングローバーによる SLAM のための最適移動方法
ホッピングローバーが自律的に向かうべき目的地に到達し,無事に探査ミッションを成功するためには,移動中常に精度よく自身の位置を知る必要があります.そのためには環境の地図が必要となり,これとその中での自身の位置を同時に推定する技術であるSLAM(Simultaneous Localization and Mapping)を実行する必要があります.
車輪型ロボットの場合には,オドメトリと呼ばれる強力な位置推定方法が利用できますが,車輪を持たないホッピングローバーがそのような方法を使うことはできません.また,よくSLAMで利用されるLidarなどのレーザーセンシング技術も粉塵の舞うホッピングローバーの探査環境では精度が著しく劣化します.
そこで,本研究ではローバーの移動方法に着目してSLAMの精度を向上することを考えました.問題は一台のローバーが一つのランドマークに対して精度よくSLAMを行うための移動方法を求めることです.移動距離の大小に伴い位置決め精度と観測精度にトレードオフがあるこの問題を解決する最適移動方法を導出することに成功しました.
